


爬行系列机器人根据轴数可分为四轴和五轴爬行机器人,根据轨道数量可分为单轨和双轨爬行机器人,现以虚拟五轴爬行机器人为例做一简要介绍。
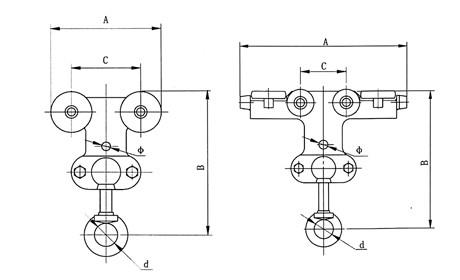
虚拟五轴爬行机器人通过轨道吸盘吸附于飞机蒙皮表面,通过并联轴的伸缩及两轴之间的速度差,再借助归类于笛卡尔坐标系中的X轴、Y轴和Z轴的走行,来改变的刀具的位置和姿态,实现真正意义上的五轴联动加工。加工时主轴离心率低,控制响应快,设备运行稳定。
应用场景:飞行器对接后的环缝制孔及壁板类的制孔。
应用实例:某支线飞机柔性导轨制孔系统。
技术优势:1、精度高,稳定性好;
2、多轴联动;
3、体积小,维修、拆卸、移动方便;
4、运动灵活、工作区域大。

